Lab
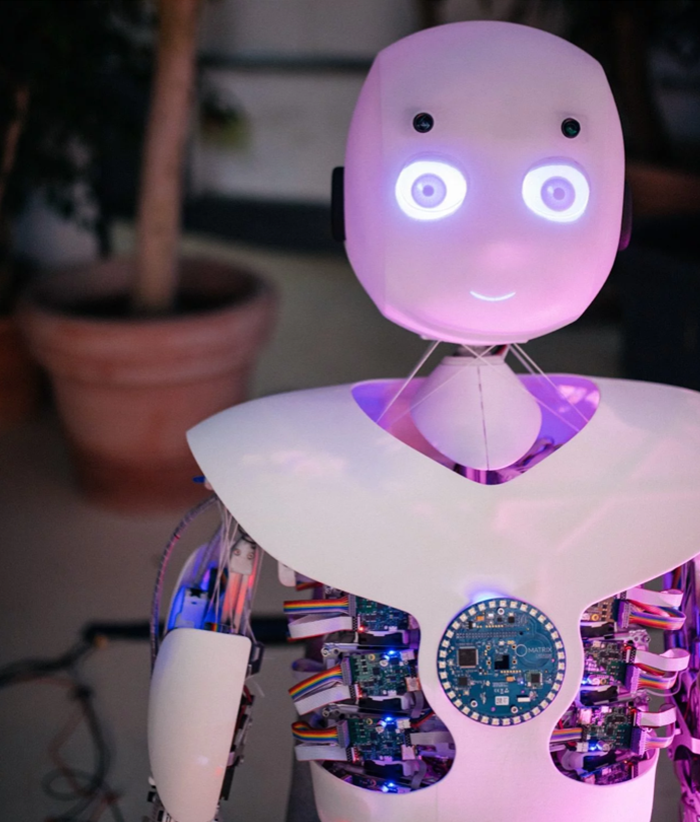
Roboy 3.0.
By Devanthro / Roboy ↗ · Germany · Revealed 2020
Tendon-driven musculoskeletal humanoid built around antagonistic muscle units, used as a teleoperated 'robody' platform out of TU Munich.
Contact
// Specs
CountryGermany
HQ cityMunich
Year revealed2020
Height—
Weight—
Payload—
Degrees of freedom—
Walking speed—
Battery life—
Lead time—
Funding raised—
Support regionsGermany
// Verified deployments
// No verified deployments listed yet.
// Related platforms